4.1. pyopus.optimizer.base — Base classes for optimization algorithms and plugins
Base classes for optimization algorithms and plugins (PyOPUS subsystem name: OPT)
Every optimization algorthm should be used in the following way.
Create the optimizer object.
Call the
reset()method of the object to set the initial point.Optionally call the
check()method to check the consistency of settings.Run the algorithm by calling the
run()method.
The same object can be reused by calling the reset() method followed by
an optional call to check() and a call to run().
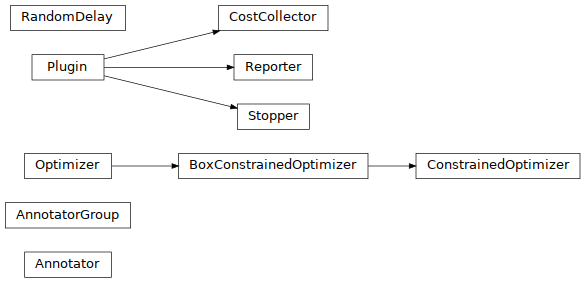
- class pyopus.optimizer.base.Annotator[source]
Annotators produce annotations of the function value. These annotations can be used for restoring the state of local objects from remotely computed results.
Usually the annotation is produced on remote workers when the cost function is evaluated. It is the job of the optimization algorithm to send the value of ft along with the corresponding annotations from worker (where the evaluation took place) to the master where the annotation is consumed (by a call to the
newResult()method of the optimization algorithm). This way the master can access all the auxiliary data which is normally produced only on the machine where the evaluation of the cost function took place.
- class pyopus.optimizer.base.AnnotatorGroup[source]
This object is a container holding annotators.
- pyopus.optimizer.base.BCEvaluator(x, xlo, xhi, f, annGrp, extremeBarrierBox, nanBarrier)[source]
Evaluator for box-constrained optimization.
Returns the function value and the annotations.
The arguments are generated by the optimizer. See the
getEvaluator()method.The evaluator and its arguments are the minimum of things needed for a remote evaluation.
See the
UCEvaluator()function for more information.
- class pyopus.optimizer.base.BoxConstrainedOptimizer(function, xlo=None, xhi=None, debug=0, fstop=None, maxiter=None, nanBarrier=False, extremeBarrierBox=False, cache=False)[source]
Box-constrained optimizer class
xlo and xhi are 1-dimensional arrays or lists holding the lower and the upper bounds on the components of x. Some algorithms allow the components of xlo to be \(- \infty\) and the components of xhi to be \(+ \infty\).
If extremeBarrierBox is set to
Truethefun()method returns \(\infty\) if the supplied point violates the box constraints.See the
Optimizerclass for more information.- bound(x)[source]
Fixes components of x so that the bounds are enforced. If a component is below lower bound it is set to the lower bound. If a component is above upper bound it is set to the upper bound.
- check()[source]
Checks the optimization algorithm’s settings and raises an exception if something is wrong.
- denormalize(y)[source]
Returns a denormalized point x corresponding to y. Components of x are
\[x^i = y^i n_s^i + n_o^i\]
- fun(x, count=True)[source]
Evaluates the cost function at x (array). If count is
TruethenewResult()method is invoked with x, the obtained cost function value, and annotations argument set toNone. This means that the result is registered (best-yet point information are updated) and the plugins are called to produce annotations.Use
Falsefor count if you need to evaluate the cost function for debugging purposes.Returns the value of the cost function at x.
- getEvaluator(x)[source]
Returns the evaluator function and its positional arguments that evaluate the problem at x.
The first positional argument is the point to be evaluated.
The evaluator returns a tuple of the form (f,annotations).
- normDist(x, y)[source]
Calculates normalized distance between x and y.
Normalized distance is calculated as
\[\sqrt{\sum_{i=1}^{n} (\frac{x^i - y^i}{n_s^i})^2}\]
- normalize(x)[source]
Returnes a normalized point y corresponding to x. Components of y are
\[y^i = \frac{x^i - n_o^i}{n_s^i}\]If both bounds are finite, the result is within the \([0,1]\) interval.
- reset(x0)[source]
Puts the optimizer in its initial state and sets the initial point to be the 1-dimensional array or list x0. The length of the array becomes the dimension of the optimization problem (
ndimmember). The shape of x must match that of xlo and xhi.Normalization origin \(n_o\) and scaling \(n_s\) are calculated from the values of xlo, xhi, and intial point x0:
If a lower bound \(x_{lo}^i\) is \(- \infty\)
\[\begin{split}n_s^i &= 2 (x_{hi}^i - x_0^i) \\ n_o^i &= x_0^i - n_s^i / 2\end{split}\]If an upper bound \(x_{hi}^i\) is \(+ \infty\)
\[\begin{split}n_s^i &= 2 (x_0^i - x_{lo}^i) \\ n_o^i &= x_0^i - n_s^i / 2\end{split}\]If both lower and upper bound are infinite
\[\begin{split}n_s^i &= 2 \\ n_o^i &= x_0^i \end{split}\]If bouth bounds are finite
\[\begin{split}n_s^i &= x_{hi}^i - x_{lo}^i \\ n_o^i &= x_{lo}\end{split}\]
- pyopus.optimizer.base.CEvaluator(x, xlo, xhi, f, fc, c, annGrp, extremeBarrierBox, nanBarrier)[source]
Evaluator for constrained optimization.
Returns the function value, the constraints values, and the annotations.
The arguments are generated by the optimizer. See the
getEvaluator()method.The evaluator and its arguments are the minimum of things needed for remote evaluation.
See the
UCEvaluator()function for more information.
- class pyopus.optimizer.base.ConstrainedOptimizer(function, xlo=None, xhi=None, constraints=None, clo=None, chi=None, fc=None, debug=0, fstop=None, maxiter=None, nanBarrier=False, extremeBarrierBox=False, cache=False)[source]
Constrained optimizer class
xlo and xhi are 1-dimensional arrays or lists holding the lower and upper bounds on the components of x. Some algorithms allow the components of xlo to be \(- \infty\) and the components of xhi to be \(+ \infty\).
constraints is a function that returns an array holding the values of the general nonlinear constraints.
clo and chi are vectors of lower and upper bounds on the constraint functions in constraints. Nonlinear constraints are of the form \(\leq c_{lo} \leq f(x) \leq c_{hi}\).
fc is a function that simultaneously evaluates the function and the constraints. When it is given, function and constraints must be
None.See the
BoxConstrainedOptimizerclass for more information.- aggregateConstraintViolation(c, useL2squared=False)[source]
Computes the aggregate constraint violation. If no nonlinear constraints are violated this value is 0. Otherwise it is greater than zero.
c is the vector of constraint violations returned by the
constraintViolation()method.if useL2squared is
Truethe L2 norm is used for computing the aggregate violation. Otherwise L1 norm is used.
- check()[source]
Checks the optimization algorithm’s settings and raises an exception if something is wrong.
- constraintViolation(c)[source]
Returns constraint violation vector. Negative values correspond to lower bound violation while positive values correspond to upper bound violation.
Returns 0 if c is zero-length.
- funcon(x, count=True)[source]
Evaluates the cost function and the nonlinear constraints at x.
If count is
TruethenewResult()method is invoked with x, the obtained cost function value, the nonlinear constraint values, and the annotations argument set toNone. This means that the result is registered (best-yet point information are updated) and the plugins are called to produce annotations.Use
Falsefor count if you need to evaluate the cost function and the constraints for debugging purposes.Returns the value of the cost function at x adjusted for extreme barrier (i.e.
Infwhen box constraints are violated or the function value isNan) and a vector of constraint function values.
- getEvaluator(x)[source]
Returns the evaluator function and its positional arguments that evaluate the problem at x.
The first positional argument is the point to be evaluated.
The evaluator returns a tuple of the form (f,c,annotations).
- newResult(x, f, c, annotations=None)[source]
Registers the cost function value f and constraints values c obtained at point x with annotations list given by annotations.
Increases the
nitermember to reflect the iteration number of the point being registered and updates thef,x,c, andbestItermembers.See the
newResult()method of theOptimizerclass for more information.
- reset(x0)[source]
Puts the optimizer in its initial state and sets the initial point to be the 1-dimensional array or list x0. The length of the array becomes the dimension of the optimization problem (
ndimmember). The shape of x must match that of xlo and xhi and x must be within the bounds specified by xlo and xhi.See the
reset()method ofBoxConstrainedOptimizerclass for more information.
- class pyopus.optimizer.base.CostCollector(chunkSize=100)[source]
A subclass of the
Pluginiterative algorithm plugin class. This is a callable object invoked at every iteration of the algorithm. It collects the input parameter vector (n components) and the aggregate function value.Let niter denote the number of stored iterations. The input parameter values are stored in the
xvalmember which is an array of shape (niter, n) while the aggregate function values are stored in thefvalmember (array with shape (niter)). If the algorithm supplies constraint violations they are stored in thehvalmember. Otherwise this member is set toNone.Some iterative algorithms do not evaluate iterations sequentially. Such algorithms denote the iteration number with the
indexmember. If theindexmember is not present in the iterative algorithm object the internal iteration counter of theCostCollectoris used.The first index in the xval, fval, and hval arrays is the iteration index. If iterations are not performed sequentially these two arrays may contain gaps where no valid input parameter or aggregate function value is found. The gaps are denoted by the valid array (of shape (niter)) where zeros denote a gap.
xval, fval, hval, and valid arrays are resized in chunks of size chunkSize.
- class pyopus.optimizer.base.Optimizer(function, debug=0, fstop=None, maxiter=None, nanBarrier=False, cache=False)[source]
Base class for unconstrained optimization algorithms.
function is the cost function (Python function or any other callable object) which should be minimzied.
If debug is greater than 0, debug messages are printed at standard output.
fstop specifies the cost function value at which the algorithm is stopped. If it is
Nonethe algorithm is never stopped regardless of how low the cost function’s value gets.maxiter specifies the number of cost function evaluations after which the algorithm is stopped. If it is
Nonethe number of cost function evaluations is unlimited.nanBarrier specifies if NaN function values should be treated as infinite thus resulting in an extreme barrier.
cache turns on local point caching. Currently works only for algorithms that do not use remote evaluations. See the
cachemodule for more information.The following members are available in every object of the
Optimizerclassndim- dimension of the problem. Updated when thereset()method is called.niter- the consecutive number of cost function evaluation.x- the argument to the cost function resulting in the best-yet (lowest) value.f- the best-yet value of the cost function.bestIter- the iteration in which the best-yet value of the cost function was found.bestAnnotations- a list of annotations produced by the installed annotators for the best-yet value of the cost function.stop- boolean flag indicating that the algorithm should stop.annotations- a list of annotations produced by the installed annotators for the last evaluated cost function valueannGrp-AnnotatorGroupobject that holds the installed annotatorsplugins- a list of installed plugin objects
Plugin objects are called at every cost function evaluation or whenever a remotely evaluated cost function value is registered by the
newResult()method.Values of x and related members are arrays.
- check()[source]
Checks the optimization algorithm’s settings and raises an exception if something is wrong.
- fun(x, count=True)[source]
Evaluates the cost function at x (array). If count is
TruethenewResult()method is invoked with x, the obtained cost function value, and annotations argument set toNone. This means that the result is registered (best-yet point information are updated), the plugins are calls and the annotators are invoked to produce annotations.Use
Falsefor count if you need to evaluate the cost function for debugging purposes.Returns the value of the cost function at x.
- getEvaluator(x)[source]
Returns a tuple holding the evaluator function and its positional arguments that evaluate the problem at x. This tuple can be sent to a remote computing node and evaluation is invoked using:
# Tuple t holds the function and its arguments func,args=t retval=func(*args) # Send retval back to the master
The first positional argument is the point to be evaluated.
The evaluator returns a tuple of the form (f,annotations).
- installPlugin(plugin)[source]
Installs a plugin object or an annotator in the plugins list and/or annotators list
Returns two indices. The first is the index of the installed annotator while the second is the index of the instaleld plugin.
If teh object is not an annotator, the first index is
None. Similarly, if the object is not a plugin the second index isNone.
- newResult(x, f, annotations=None)[source]
Registers the cost function value f obtained at point x with annotations list given by annotations.
Increases the
nitermember to reflect the iteration number of the point being registered and updates thef,x, andbestItermembers.If the annotations argument is given, it must be a list with as many members as there are annotator objects installed in the optimizer. The annotations list is stored in the
annotationsmember. If f improves the best-yet value annotations are also stored in thebestAnnotationsmember. The annotations are consumed by calling theconsume()method of the annotators.Finally it is checked if the best-yet value of cost function is below
fstopor the number of iterations exceededmaxiter. If any of these two conditions is satisfied, the algorithm is stopped by setting thestopmember toTrue.
- class pyopus.optimizer.base.Plugin(quiet=False)[source]
Base class for optimization algorithm plugins.
A plugin is a callable object with the following calling convention
plugin_object(x, ft, opt)where x is an array representing a point in the search space and ft is the corresponding cost function value. If ft is a tuple the first member is the cost function value, the second member is an array of nonlinear constraint function values, and the third member is the vector of constraint violations. A violation of 0 means that none of the nonlinear constraints is violated. Positive/negative violations indicate a upper/lower bound on the constraint function is violated. opt is a reference to the optimization algorithm where the plugin is installed.
The plugin’s job is to produce output or update some internal structures with the data collected from x, ft, and opt.
If quiet is
Truethe plugin supresses its output. This is useful on remote workers where the output of a plugin is often uneccessary.
- class pyopus.optimizer.base.RandomDelay(obj, delayInterval)[source]
A wrapper class for introducing a random delay into function evaluation
Objects of this class are callable. On call they evaluate the callable object given by obj with the given args. A random delay with uniform distribution specified by the delayInterval list is generated and applied before the return value from obj is returned. The two members of delayInterval list specify the lower and the upper bound on the delay. f
Example:
from pyopus.optimizer.base import RandomDelay def f(x): return 2*x # Delayed evaluator with a random delay between 1 and 5 seconds fprime=RandomDelay(f, [1.0, 5.0]) # Return f(10) without delay print f(x) # Return f(10) with a random delay between 1 and 5 seconds print fprime(10)
- class pyopus.optimizer.base.Reporter(onImprovement=True, onIterStep=1)[source]
A base class for plugins used for reporting the cost function value and its details.
If onImprovement is
Truethe cost function value is reported only when it improves on the best-yet (lowest) cost function value.onIterStep specifies the number of calls to the reporter after which the cost function value is reported regardless of the onImprovement setting. Setting onIterStep to 0 disables this feature.
The value of the cost function at the first call to the reporter (after the last call to the
reset()method) is always reported. The mechanism for detecting an improvement is simple. It compares theniterand thebestIterattributes of opt. The latter becomes equal to the former whenever a new better point is found. See theupdateBest()method of the optimization algorithm for more details.ft is a tuple for nonlinearly constrained optimizers. More details can be found in the documantation of the
Pluginclass.The reporter prints the function value and the cumulative constraint violation (h).
The iteration number is obtained from the
nitermember of the opt object passed when the reporter is called. The best-yet value of the cost function is obtained from thefmember of the opt object. This member isNoneat the first iteration.
- class pyopus.optimizer.base.Stopper(quiet=False)[source]
Stopper plugins are used for stopping the optimization algorithm when a particular condition is satisfied.
The actuall stopping is achieved by setting the
stopmember of the opt object toTrue.
- pyopus.optimizer.base.UCEvaluator(x, f, annGrp, nanBarrier)[source]
Evaluator for unconstrained optimization.
Returns the function value and the annotations.
This function should be used on a remote computing node for evaluating the function. Its return value should be sent to the master that invoked the evaluation.
The arguments for this function are generated by the optimizer. See the
getEvaluator()method.The evaluator and its arguments are the minimum of things needed for a remote evaluation.
By using this function one can avoid pickling and sending the whole optimizer object with all of its auxiliary data. Instead one can just pickle and send the bare minimum needed for a remote evaluation.