11.5.3. Task settings
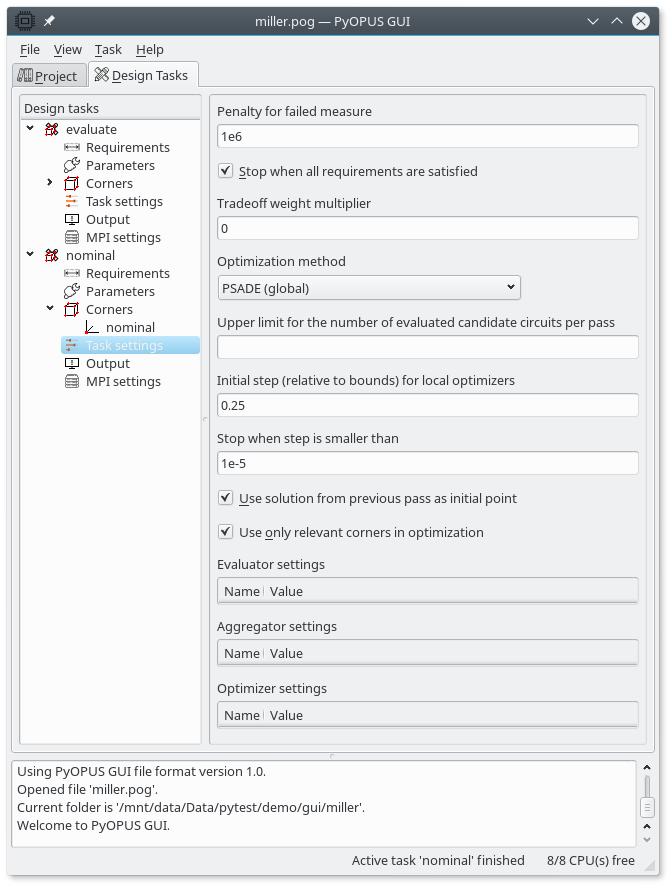
Under Task settings you can set up the task’s behavior. The optimizer tries to find a better circuit by minimizing a so-called cost function. The penalty that is added to the cost function is set under “Penalty for failed measures”. This should be a large value so that the optimizer avoids circuits that can’t be evaluated.
If “Stop when all requirements are satisfied” is checked the optimizer will stop as soon as it finds a circuit that satisfies all design requirements. If unchecked the optimizer runs until it reaches the limit on the number of evaluated candidate circuits or until it converges. This can take a significant amount of time and does not neccessarily produce a better result.
If you specify at least one tradeoff weight in the definition of design requirements under the Requirements item and set the “Tradeoff weight multiplier” to a nonzero value the optimizer will try to improve the circuit beyond the specified design requirements for those performance measures for which you specified a tradeoff weight. This is acieved by adding a negative penalty to the cost function for every circuit that exceeds the design requirements. The “Tradeoff weight multiplier” specifies how large this reward should be. Usually you set it to a value much smaller than one (i.e. 1e-3) because the optimizer should primarily satisfy the design requirements and not try to improve the circuit beyond them untill all of them are satisfied. It makes sense to uncheck the “Stop when all requirements are satisfied” option if you set the tradeoff weight multiplier to a nonzero value.
There are several optimization methods available.
PSADE - a global method based on simulated annealing and differential evolution
Differential evolution - a global optimization method
QPMADS - a local optimization method based on quadratic models and mesh adaptive direct search
Box’s constrained simplex - a local method, an extension of the Nelder-Mead simplex method that supports constraints.
Hooke-Jeeves - a local method from the family of pattern search algorithms
Addittionally two methods that only evaluate the circuit for the initial values of the design parameters are available.
Evaluate only (required corner-analysis pairs) - evaluated only those corner-analysis pairs for which a performance measure is defined and at least one design requirement (above/below) is imposed.
Evaluate only (all corner-analysis pairs) - evaluates all available corner-analysis pairs. Useful for generating wavefors that are used for initially setting up the performance measures in the postprocessing section of the results tab. This is the default setting when you create an evaluation/corner-based design task.
Task settings.
Optimization is performed in mutiple passes (i.e. multiple consecutive
runs of an optimization algorithm). The upper limit for the number of
evaluated candidate circuits per pass is exactly what you expect it to be.
It sets the maxiter parameter of the optimization algorithm.
The “Initial step” and “Stop when step is smaller than” are for setting the optimizer’s initial step and the step-based stopping condition. These two values translate to parameters passed to the constructor of the optimization algorithm.
PSADE - the two settings are not passed
Differential evolution - the two settings are not passed
QPMADS - “Stop when step is smaller than” is passed as the
stopStepargument. “Initial step” is passed via thescalingargument where components ofscalingare computed by multiplying the difference between the upper and the lower bound on design parameters with “initial step”.Box’s constrained simplex - the first setting is passed as the
initial_boxargument and the second one is passed as thegamma_stopargumentHooke-Jeeves - “Stop when step is smaller than” is passed as the
minstepargument. “Initial step” is passed via thestep0argument where components ofstep0are computed by multiplying the difference between the upper and the lower bound on design parameters with “initial step”.
Checking “Use solution from previous pass as initial point” uses the solution of the last completed optimization pass as the initial point for the next pass. The initial point for the first pass is defined with the initial values of the design parameters.
Checking “Use only relevant corners in optimization” enables the iterative algorithm for finding the corners where worst values of performance measures take palce. If unchecked every candidate circuit is evaluated across all corners which can be very expensive if you define many corners.
Finally, there tables “Evaluator settings”, “Aggregator settings”, and
“Optimizer settings” allow you to specify arbitrary parameters for the
constructors of pyopus.evaluator.performance.PerformanceEvaluator,
pyopus.evaluator.aggregate.Aggregator, and the optimizer algorithm.
You can use hash expressions for the values in these tables.
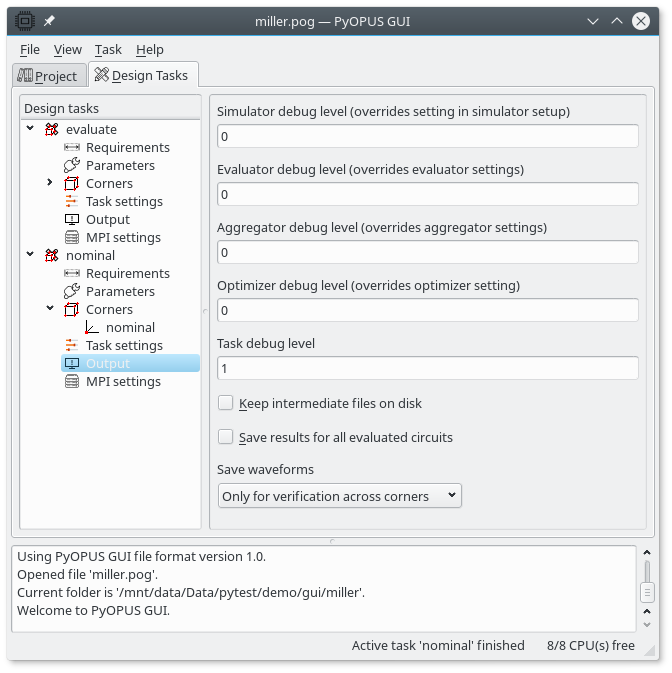
Output settings of a task.
Under the Output item you can specify what will be written to the log file and which waveforms will be stored. Debug levels can be specified for various PyOPUS components. A debug level of zero meand no debug messages are written to the log. Higher levels result in more verbosity. The debug level can be set for the simulator, the evaluator, the aggregator, the optimizer, and the task itself. By default the task’s debug level is set to 1 so that you can monitor the task’s progress in the log.
Enabling “Keep intermediate files on disk” will keep all simulator input and output files on disk. Normally these files are deleted once a circuit is evaluated and the waveforms are collected.
Enabling “Save results for all evaluated circuits” will create a node in the results database for every evaluated circuit. Normally the results are stored only for circuits that improve the value of the cost function.
The “Save waveforms” selector specified for which circuits the waveforms will be stored. It has three options.
Never
Only for verification across corners (default)
For every saved results
The second option saves the waveforms for circuit verification that takes place in in the beginning and the end of the task, and between optimization passes.